text-mode.org
Text graphics: ASCII, PETSCII and its distant relatives.
⭐ random
links
twitter
tumblr
search
about
donate
←←
2014-08-07
2010s
,
2014
,
japan
,
shiftjis
.
◊
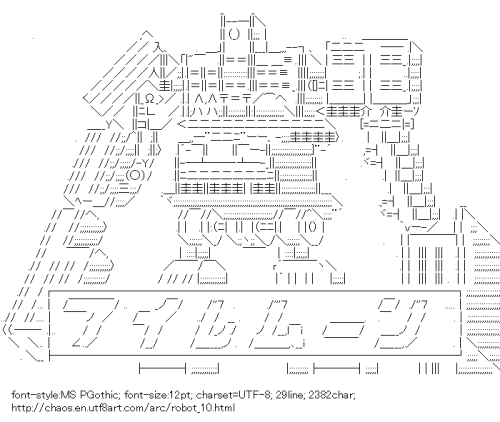
Shift_JIS robot,
via
←
Previous post
Next post
→